
안녕하세요 밥 엉클입니다
어제 2024-25 UEFA 네이션스리그 매치데이6 조별 경기가 모두 끝이 났습니다
승격/강등 플레이오프 녹아웃 스테이지 관련해서 함께 알아보고
경기 결과와 조별 순위 함께 보시죠!
2024-25 UEFA 네이션스리그 조별 순위
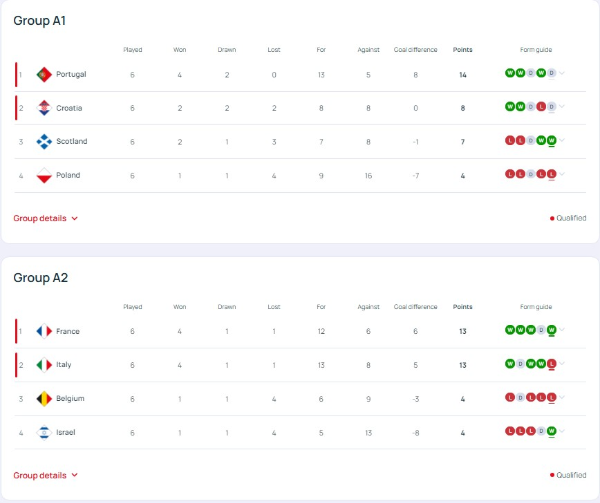

먼저 A그룹입니다
8강에 진출하게 되는 팀은 각 조 1위와 2위 입니다
리그 A에서 8개팀 입니다
A1 - 포르투갈, 크로아티아
A2 - 프랑스, 이탈리아
A3 - 독일, 네덜란드
A4 - 스페인, 덴마크
8강에서 만나게 됩니다

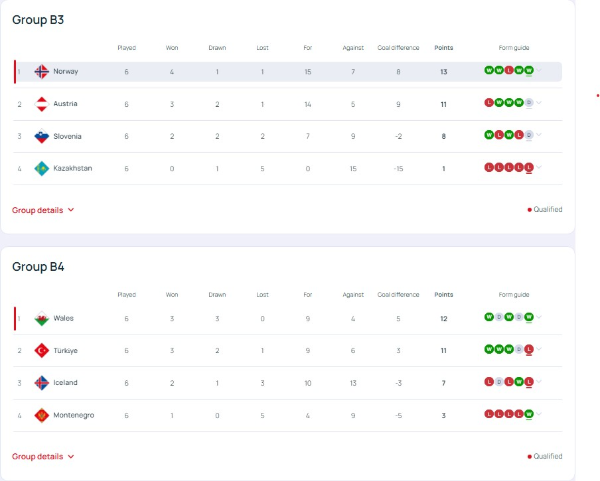
다음은 리그 B 함께 보겠습니다
B1 - 체코
B2 - 잉글랜드
B3 - 노르웨이
B4 - 웨일스
4개 팀이 리그 A로 승격하게 되었습니다
다음 시즌에는 리그 A에서 4개 팀을 만날 수 있습니다


다음은 리그 C 입니다
C1 - 스웨덴
C2 - 루마니아
C3 - 북아일랜드
C4 - 북마케도니아
리그 C에서도 1위 팀이 승격을 하게 됩니다
C2 루마니아는 코소보와의 경기가 몰수승으로 마무리되어
승점 3점을 획득해 조 1위로 다음 시즌 리그 B로 승격합니다

마지막 리그 D입니다
D1 - 산마리노
D2 - 몰도바
산마리노는 원정 첫응리나는 기록을 세우면서
리그 C로 승격하는 이변을 만들어 냅니다
다음 시즌 전력 차이가 많이 나는 강팀들과 붙게 되었습니다
2024-25 UEFA 네이션스리그 매치데이6 경기 결과

튀르키예가 몬테네글에게 패하면서 리그 A 다이렉트 승격에 실패했습니다
2위로 마무리하는 튀르키예입니다
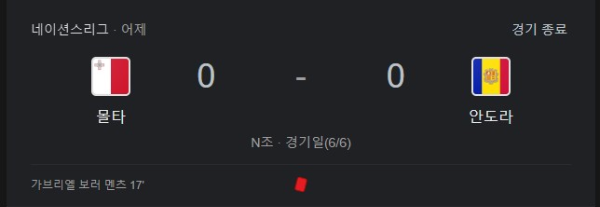
다득점으로 승리한다면 다음 시즌 리그 C로 승격할 수 잇는 가능성이 보였던 몰타
하지만 퇴장 이슈와 함께 무승부를 만들어내면서 승격의 꿈은 멀어지고 말았습니다

득실차에서 이미 8강 진출은 확정 지은 네덜란드
보스니아와 무승부를 기록하며 2위로 마무리합니다

득실차에서 앞서기는 했지만 슬로바키아가 다득점 승리를 한다면 1위 자리를 내주어야 했던
스웨덴이 아제르바이잔에게 다득점 승리를 얻어냅니다
이로써 다음 시즌 리그 B로 승격합니다
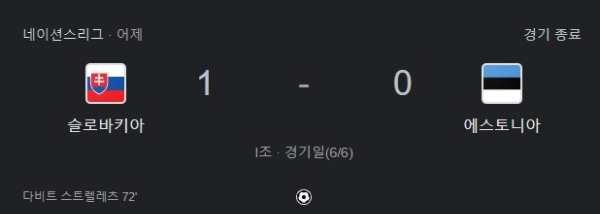
슬로바키아가 다득점 승리를 했다면 승격을 바라볼 수도 있었으나
스웨덴이 그런 모습을 지켜보지 못하면서 슬로바키아는 2위로 마무리하게됩니다

경우의 수가 존재 했던 그룹 B1
우크라이나가 승리하면서 긴장되는 상황이었지만
이번 시즌은 2위로 마무리하게 되었습니다

튀르키예와 단 2점 차이로 2위에 위치했던 웨일스
아이슬란드에게 4득점 하면서 승점 3점을 쌓아 1위를 탈환하며
다음 시즌 리그 A로 승격합니다

체코는 승점 3점을 추가하면서 완벽한 승격을 이루어 냅니다

조 1위로 8강 진출을 확정 지은 후 만난 헝가리와 마지막 경기 무승부로 마무리하면서
독일은 8강을 맞이합니다
2024-25 UEFA 네이션스리그 조별 리그 모든 경기가 마무리 되었습니다
이제 8강 토너먼트 그리고 승격/강등 플레이오프가 남아있습니다
8강 토너먼트 추첨 및 일정은 다음 글에서 함께 다루어 보도록 하겠습니다
오늘도 방문해 주셔서 감사합니다!
'축구' 카테고리의 다른 글
| 2024-25 EPL 프리미어리그 12라운드 순위 경기결과 맨시티 5연패 손흥민 어시스트 (3) | 2024.11.25 |
|---|---|
| 2024-25 EPL 프리미어리그 12라운드 주말 경기일정 및 순위 맨유 아모림 감독 데뷔전 (9) | 2024.11.22 |
| 2026 북중미 월드컵 아시아 지역 3차 예선 대한민국 vs 팔레스타인 충격 무승부 경기 결과 및 B조 순위 (3) | 2024.11.20 |
| 2026 북중미 월드컵 아시아 3차 예선 6차전 경기 결과 및 조별 순위 (7) | 2024.11.20 |
| 2024-25 UEFA 네이션스리그 매치데이 6 경기결과 및 순위 승격/강등 플레이오프 진출팀은? (3) | 2024.11.19 |



